RANSAC 停止准则的修正:从近似到精确
文章概述
几年以前在自己写RANSAC算法时候, 就发现利用Multi-View Geometry那本圣经中的停止准则来计算迭代次数,似乎不能得到最好的解。 后来面试过一些候选人,他们也发现了这个问题。 但是我从未怀疑过是理论出了问题,况且在读那本Multi-View Geometry一书的时候,我也确信自己是读懂了的。 今年发现这篇文章,真的是有那种感觉,就是发现有问题的地方,应该好好思考,敢于怀疑。好了,说了这么多其实这篇文章很短, 就是修正了RANSAC 算法停止准则中概率的近似计算问题。 文章地址: https://arxiv.org/abs/2503.07829
文章题目:Fixing the RANSAC Stopping Criterion, 由 Johannes Schönberger、Viktor Larsson 和 Marc Pollefeys 发表于今年-- 2025 年。 一作是Colmap的作者。
正题
RANSAC(Random Sample Consensus)自 1981 年由 Fischler 和 Bolles 提出以来,一直是计算机视觉中最常用的鲁棒估计算法之一 。设 s 表示期望我们RANSAC算法的采样中至少能有一次采样点都是内点,也就是能够正确工作的期望概率, 例如0.99。设 P 表示一次采样全部都是内点的概率。我们尝试采样次数N应该满足:
两边取对数,并且注意到(1 − P ) < 1 ,我们有
原始的paper给定所有内点的概率的计算公式为:
但是,这其实是一个近似解(Pa中的a表示是一个approximate)。 论文指出,正确的精确(exact)概率应该是:
其实可以等价表示为:
n 为整体样本数量, pn 是内点数量。如果pn > k,那么P = ,否则P = 0。
效果
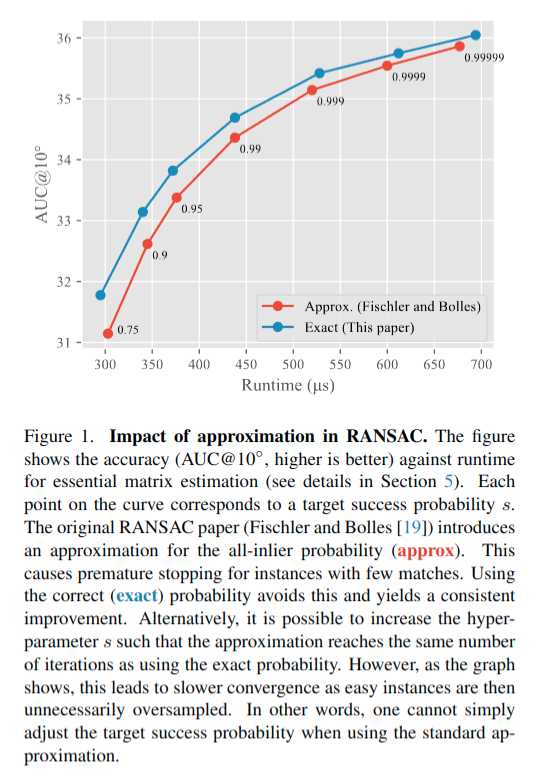
作者实验了使用精确计算和近似计算的效果。
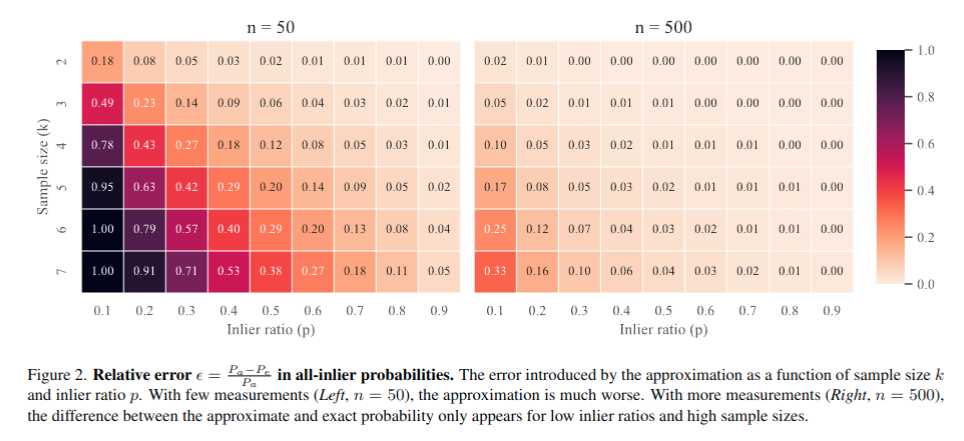
并且分析了pa与pe之间的相对误差关系与内点率和sample 维度K之间的关系,见下图。
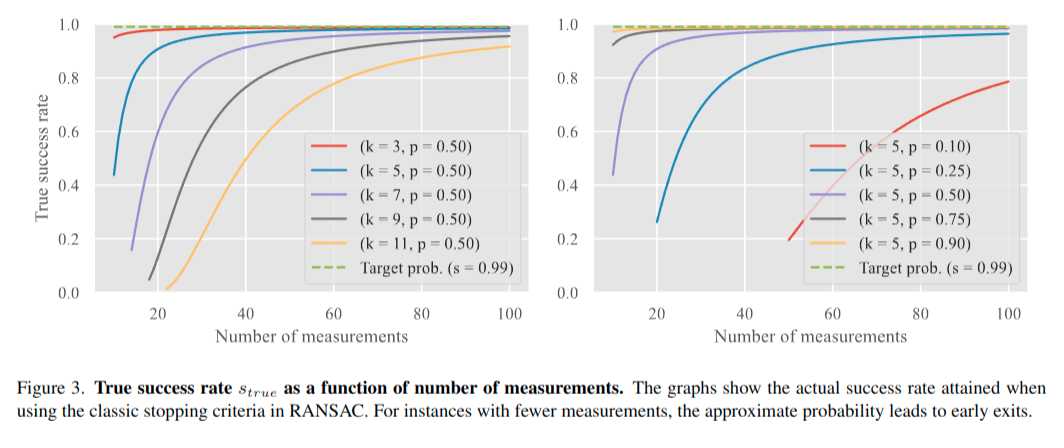
作者还分析了概率估计对真正的s(RANSAC正确工作的概率)的影响
其中
实际影响
最后总结起来,就是使用错误的概率计算方法,导致RANSAC算法在某些场景下表现不佳。
- 欠采样:RANSAC 在挑战性场景中过早停止
- 模型失败:无法找到好的模型
- 性能下降:在低内点比例场景中表现不佳
- 参数K数量:K越大越容易出现错误
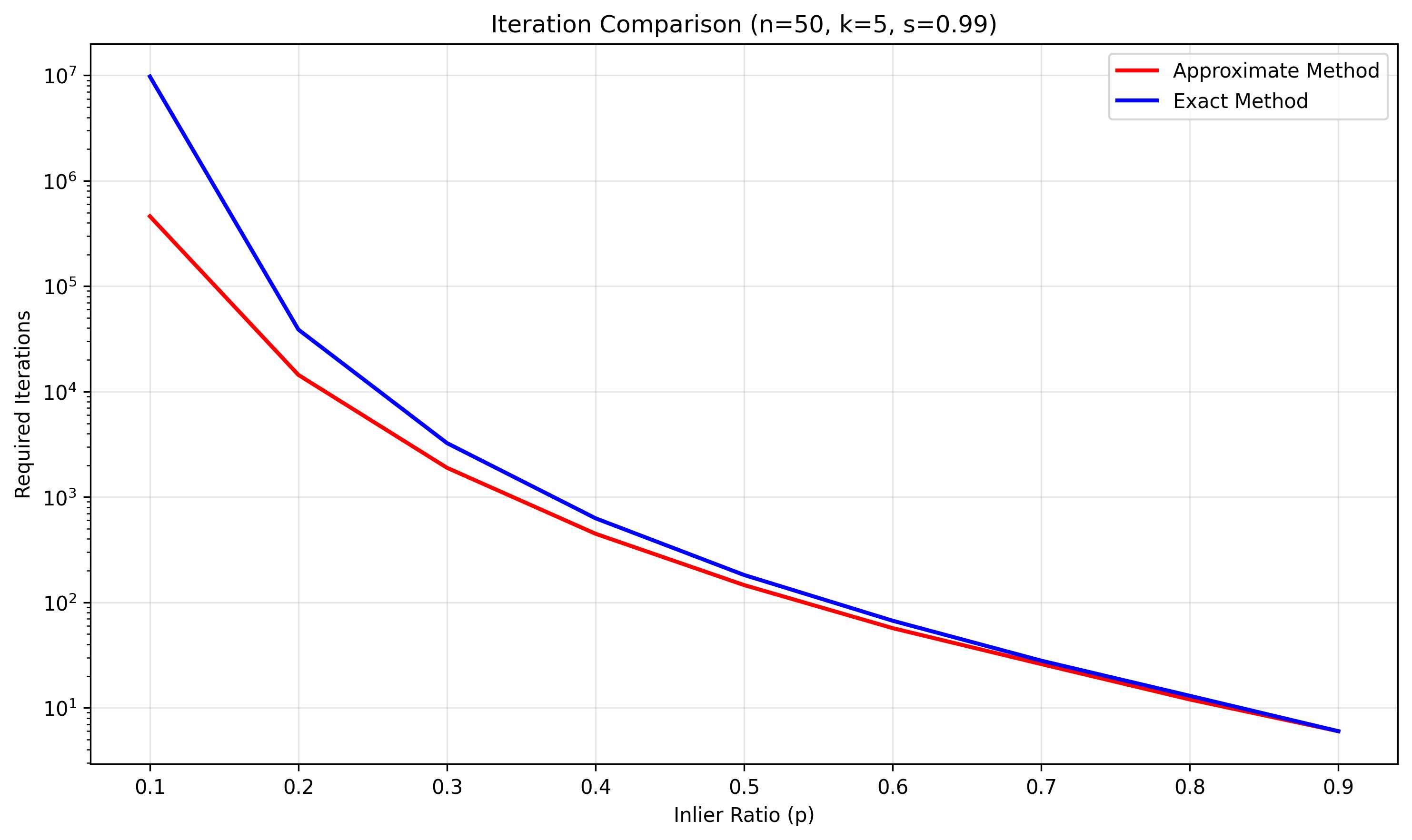
下图是我自己写的一个脚本来直观的看下近似估计和精确估计之间,对于迭代次数N的估计差异。
精确停止准则的实现
实现精确概率计算非常简单:
def exact_all_inlier_probability(n, p, k):
""计算精确的全内点采样概率""
pn = int(p * n) # 内点总数
if pn < k:
return 0.0
probability = 1.0
for i in range(k):
probability *= (pn - i) / (n - i)
return probability
停止准则计算
def compute_iterations(s, P):
""计算所需的迭代次数""
if P >= 1.0:
return 1
return math.ceil(math.log(1 - s) / math.log(1 - P))
开源项目影响
论文调查了多个流行的开源项目,发现几乎所有项目都使用了错误的近似方法,包括:
- OpenCV
- scikit-image
- scikit-learn
- COLMAP
- OpenMVG
- ORB-SLAM3
修复的简单性
修正这个问题通常只需要几行代码的改动,但能带来显著的性能提升。
结论与意义
主要贡献
- 理论分析:首次系统分析了 RANSAC 停止准则中的近似误差
- 精确解决方案:提出了简单有效的精确概率计算方法
- 实验验证:在多个计算机视觉问题上验证了改进效果
实际意义
- 在挑战性场景中显著提高模型估计成功率
- 减少灾难性估计失败
- 为计算机视觉社区提供重要的算法修正
局限性
- 精确方法会增加运行时间,特别是在困难场景中
- 未考虑测量噪声、最小求解器稳定性等其他因素
- 未在所有 RANSAC 变体上进行全面测试
未来展望
这项工作为 RANSAC 算法的进一步改进奠定了基础,未来可以:
- 将精确停止准则集成到所有流行的 RANSAC 实现中
- 研究其他影响成功概率的因素
- 开发统一的框架来综合考虑各种影响因素
参考文献:Schönberger, J., Larsson, V., & Pollefeys, M. (2025). Fixing the RANSAC Stopping Criterion. arXiv preprint arXiv:2503.07829.